RWS
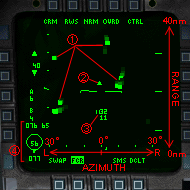
RWS(Range While Scan)モードはレーダー走査で捕らえられた全ての目標を映し出す基本的な空対空レーダーモードです。索敵で主に使う他、視程外(BVR)戦闘時の目標指示などに使います。
MFDにFCRメニューページを表示させRWSモードを選択するか、RWSページが現れるまで[F1]キーを繰り返し押します。
スクリーンは縦軸が距離(range)を表していて、一番下が0nm、一番上が選択されている距離(上の図の場合は40nm)となっています。横軸は方位(azimuth)を表していて中心が真正面(0°)で左右端がそれぞれ30°方向となっています。
オプションセレクトボタン(OSB)の機能またはボタン位置のラベルの意味は以下の通りです。
| OSB-1 CRM | Combined Radar Modeであることを示しています。CRMのサブモードは他にTWS、VSモードがあります。ボタンを押すと他のレーダーモードに切り替わります。 |
| OSB-2 RWS | Range While Scanモードであることを示しています。 |
| OSB-3 NRM | レーダーがノーマルモードであることを示しています。 |
| OSB-4 OVRD | ボタンをレーダー波放射を停止します。停止中は画面に"NO RAD"と表示されます。ボタンを再度押すと放射を再開します。 |
| OSB-5 CTRL | レーダーコントロールページが機能していることを示しています。 |
| OSB-11 DCLT | FALCON4.0では使用しません。 |
| OSB-12 SMS | ボタンを押すとSMSページを開きます。 |
| OSB-14 FCR | FCRメニューページに戻ります。 |
| OSB-15 SWAP | ボタンを押すと左右のMFDのモードを入れ替えます。 |
| OSB-17 B | 数値は垂直方向(Bar)の走査範囲を示していて、ボタンまたは[Shift]+[F8]キーを押すことで範囲(1,2,4)を切り替えます。 |
| OSB-18 A | 数値は水平方向(Azimuth)の走査範囲(x10°)を示していて、ボタンまたは[F8]キーを押すことで範囲(10,20,30,60)を切り替えます。60以外が選択されている場合には画面にアジマスゲートと呼ばれる2本の垂直線でその向きと範囲を示します。 |
| OSB-19/20 | 表示する距離を設定します。数値は現在設定されている距離(nm)です。OSB19/20または[F3]/[F4]キーを押すことで距離を減/増させます。設定できる距離は10、20、40、80、160です。 |
RWS-SAM
RWS-SAM(Situational Awareness Mode)はRWSのサブモードで、RWSモードで指示された目標を追跡しその目標に関する詳しい情報を表示すると同時にその他の目標の探知も引き続き行ないます。
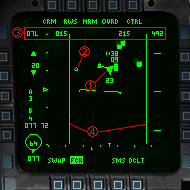
追跡中の目標を再度指示するとSTTモードに切り替わります。その他の目標を指示した場合はRWS-SAMのままでその目標に追跡が切り替わります。KP[.]キーを押して追跡を取り消すとRWSモードに戻ります。